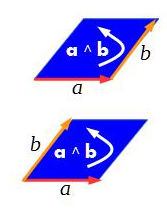
A bivector is an oriented plane segment. Just as a vector has a magnitude and a direction so a bivector has a magnitude corresponding to its area and an orientation. Bivectors are skew-symmetric matrices which are the type of matrices used to calculate the cross product. Bivectors are not rotation matrices. Bivectors are derivatives of rotations. If you add the identity matrix to it and multiply by dθ then it can be used to perform an infinitesimal rotation.
In three dimensions a bivectors orientation can be represented with a single vector (the axis of rotation) therefore in three dimensions a bivector is a pseudovector. In other words, in three dimensions the dual of a bivector is a vector.
A∧B is the wedge product of A and B which is a simple bivector or 2-blade
In four spatial dimensions a rigid object can rotate in two separate ways simultaneously. The resulting Clifford rotation requires four vectors to define it. The resulting structure, A∧B + C∧D, cannot be simplified further and is no longer considered a 2-blade. Oddly, however, it is still called a bivector even though it requires four vectors to define it.
In four spatial dimensions the magnetic field would be is a bivector field. This is because the B-field is defined to be the curl of an A-field, known as the magnetic vector potential, which is derived from the 2nd Maxwell's Equation of ∇ ∙ B = 0, and since a curl is defined as ∇ ∧ F, a curl of a vector field is a bivector field, and because B = ∇ ∧ A, B is a bivector field. As a matter of fact, all solenoidal fields in 4 spatial dimensions that have vector potentials are bivector fields.